I currently have a Gyre pump and while I like its ability to move water, I don't like the simplistic flow control. Since the motor is a BLDC using BEMF control, I thought why not look into what options are available. Seems there are options, but all fairly complex until I found the following from TI:
http://www.digikey.com/product-deta...m-pQCQ3ZTt6QK8i24nfmOYCQ1SUb-6cD_9hoCPH3w_wcB
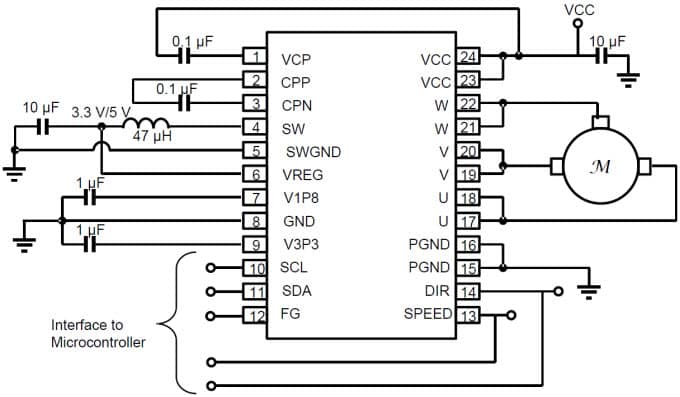
http://www.ti.com/lit/ug/slwu083a/slwu083a.pdf
Their sensorless BLDC chip on a demo board ready to go. Employs 5V PWM for speed control and allows forward and reverse control as well as lockup and thermal protection. I'm really tempted to buy one of these and see what can be done. I'd love to be able to drive the motor from my RPi/Arduino controller. I really want to implement a sine wave flow pattern that simulates ebb and flow of the waves with surges once or maybe twice a day to emulate tidal shifts. Something like A + B*sin(t/43000) + C*sin(t/10). Time is in seconds. A, B, and C can be time varying to simulate randomness or be a randomly changing amplitude.
Has anyone else considered the TI sensorless BLDC controller? Any obstacles you may see that will get in the way? I'm already aware of the BEMF constant, but that can be approximated thru experimentation. Just looking for input and if you know of any obstacles that may be impossible or very difficult to overcome.
http://www.digikey.com/product-deta...m-pQCQ3ZTt6QK8i24nfmOYCQ1SUb-6cD_9hoCPH3w_wcB
http://www.ti.com/lit/ug/slwu083a/slwu083a.pdf
Their sensorless BLDC chip on a demo board ready to go. Employs 5V PWM for speed control and allows forward and reverse control as well as lockup and thermal protection. I'm really tempted to buy one of these and see what can be done. I'd love to be able to drive the motor from my RPi/Arduino controller. I really want to implement a sine wave flow pattern that simulates ebb and flow of the waves with surges once or maybe twice a day to emulate tidal shifts. Something like A + B*sin(t/43000) + C*sin(t/10). Time is in seconds. A, B, and C can be time varying to simulate randomness or be a randomly changing amplitude.
Has anyone else considered the TI sensorless BLDC controller? Any obstacles you may see that will get in the way? I'm already aware of the BEMF constant, but that can be approximated thru experimentation. Just looking for input and if you know of any obstacles that may be impossible or very difficult to overcome.